

– Understanding the Technological Foundations of Autonomous Driving
At the heart of autonomous driving lies a sophisticated web of technologies that closely mimic human perception and decision-making. Central to this system are sensor arrays that include LIDAR, radar, cameras, and ultrasonic sensors-each contributing unique data to construct a comprehensive 360-degree view of the environment. These sensors feed into advanced machine learning algorithms, which analyze the incoming information in real-time to detect obstacles, interpret traffic signals, and predict the movement of othre road users. Together, this fusion of hardware and software forms a dynamic neural network enabling vehicles to navigate complex scenarios with increasing precision.
Moreover, the backbone of autonomous functionality is supported by cutting-edge mapping and localization technology. High-definition maps combined with GPS are critical for pinpointing exact vehicle location and planning routes with remarkable accuracy. The coordination between perception systems and path planning algorithms allows the vehicle to make rapid decisions, adapting to unpredictable conditions such as pedestrian crossings or sudden changes in traffic flow. This intricate interplay is summarized in the table below, highlighting key technological components and their roles in autonomous driving:
| Technology | Primary Function | Key Challenge |
|---|---|---|
| LIDAR | 3D environmental mapping | High cost and weather sensitivity |
| Radar | Detecting objects at long range | Limited resolution for small objects |
| Cameras | Visual recognition of signs/signals | Lighting conditions affect accuracy |
| machine Learning | Real-time decision making | Handling rare or unexpected events |
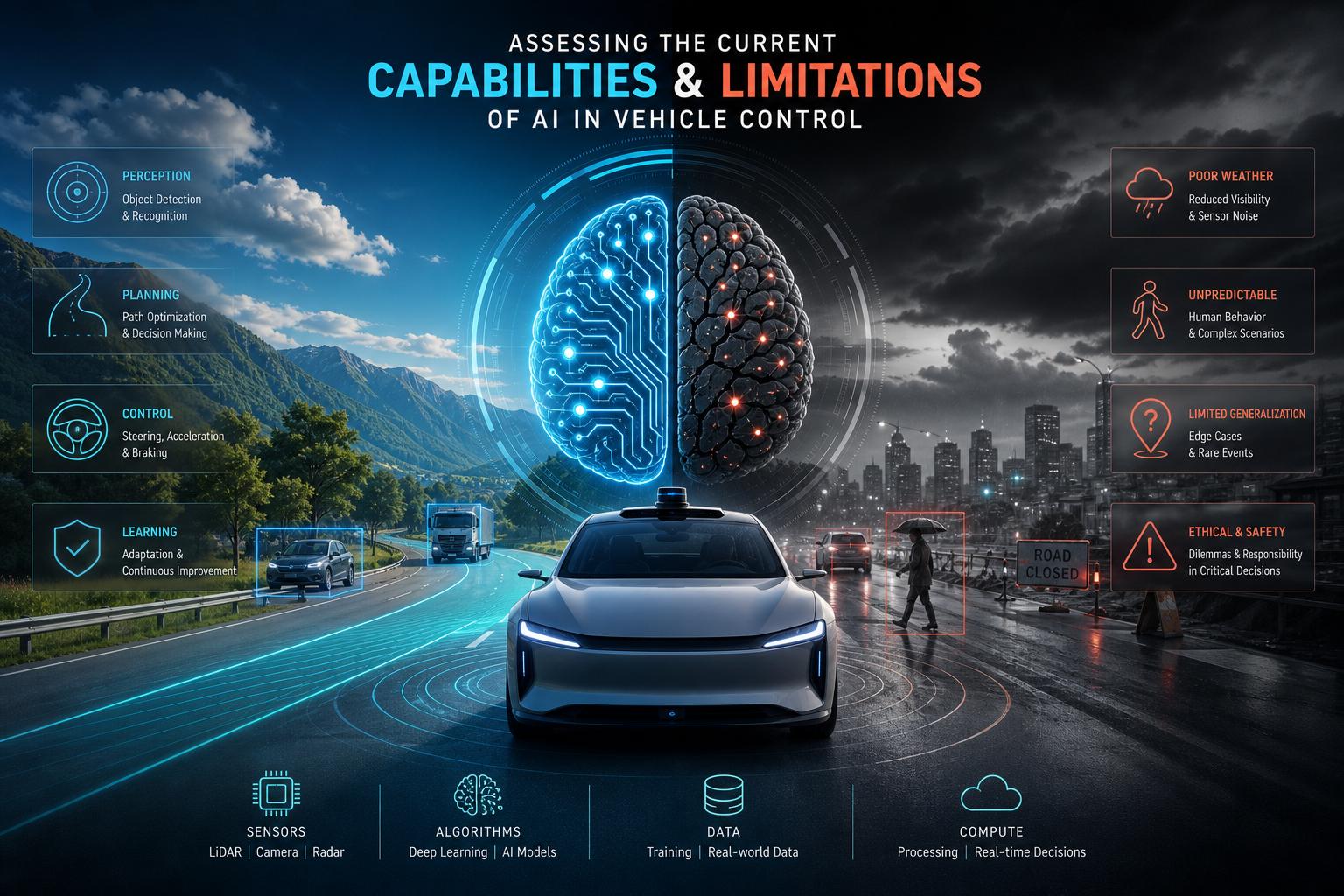
- Assessing the Current Capabilities and Limitations of AI in Vehicle Control
Artificial Intelligence has demonstrated remarkable advancements in vehicle control systems, yet it remains a work in progress when it comes to achieving full autonomy. Modern AI-driven vehicles excel in predictable environments, leveraging technologies such as LiDAR, radar, and advanced computer vision to interpret and react to road conditions, traffic signals, and obstacles.Despite these strengths, current limitations persist in complex scenarios requiring nuanced human judgment, such as dynamic urban settings, unexpected pedestrian behavior, and adverse weather conditions. These challenges underscore the gap between high-level automation and truly autonomous driving without human oversight.
Key technical limitations include:
- Imperfect perception systems that may misinterpret or miss critical objects.
- Difficulty in navigating unstructured or poorly marked roads.
- Limited ability to predict and adapt to erratic behavior by other drivers or pedestrians.
- Dependence on high-quality,up-to-date map data which is not always available.
| Capability | Current Performance | Primary Limitation |
|---|---|---|
| Obstacle Detection | High accuracy in stable conditions | Reduced reliability in poor weather |
| Decision Making | Effective on highways | Struggles in complex urban environments |
| Navigation | Precise with available maps | Fails in unmapped areas |
While AI’s capabilities in vehicle automation have transformed the concept of driving, the blend of environmental unpredictability and technological constraints means full autonomy remains an aspirational goal. Continued innovation and rigorous testing are critical to bridging these gaps, ensuring that AI-driven vehicles can handle the unpredictable realities of everyday driving with safety and reliability.
– Evaluating Safety Challenges and Regulatory Implications for Fully Autonomous Cars
As fully autonomous vehicles move closer to widespread adoption, the complexity of safety challenges that developers and regulators face cannot be overstated. Unlike traditional vehicles, these self-driving cars must interpret unpredictable real-world conditions, from erratic human drivers to sudden environmental changes, without human intervention. Ensuring the reliability of sensor systems, AI decision-making algorithms, and fail-safe mechanisms is paramount to prevent accidents and mitigate risks. Moreover, autonomous cars must be tested rigorously in diverse scenarios to validate their performance across countless variables, making comprehensive simulations and real-world pilot projects essential components in assessing their safety readiness.
Regulatory frameworks are struggling to keep pace with the rapid evolution of autonomous technology, creating a landscape of inconsistency and uncertainty. Governments and transportation authorities worldwide are challenged to balance fostering innovation with establishing stringent safety standards to protect public welfare. Critical issues like liability in crash incidents, cybersecurity vulnerabilities, and ethical programming choices complicate regulatory efforts. Below is a simplified overview of current regulatory concerns:
| Regulatory Category | Key Concerns |
|---|---|
| Certification & testing | Ensuring AI systems meet minimal safety benchmarks |
| Liability & Insurance | Assigning fault in autonomous vehicle incidents |
| Cybersecurity | Protecting vehicles from hacking and data breaches |
| Ethical Programming | Embedding decision-making that aligns with societal values |
- dynamic policy reform: Regulations must evolve alongside tech advancements.
- Public transparency: Clear communication about autonomous capabilities and limitations.
- Inter-agency collaboration: Coordinated efforts among lawmakers, engineers, and safety experts.
– Strategic Recommendations for Advancing AI-Driven Vehicle Autonomy
To propel the evolution of AI in autonomous vehicles, it is indeed essential to invest heavily in robust sensor fusion technologies that synthesize data from multiple sources such as LiDAR, radar, and cameras. This multidimensional data integration enhances environmental perception accuracy and supports real-time decision-making under diverse driving conditions. Equally vital is the prioritization of adaptive machine learning models that continuously learn from new scenarios across geographies, weather patterns, and traffic behaviors. These models should be developed with transparency, ensuring explainability in decision processes to bolster trust and regulatory approval.
Policy frameworks must align closely with technological advancements by establishing stringent safety protocols and clear liability guidelines. Collaboration between industry stakeholders can foster standardized testing procedures and create comprehensive datasets representing a range of edge cases. the table below summarizes key strategic pillars essential for advancing AI-driven vehicle autonomy:
| Strategic Pillar | Focus Area | Expected Outcome |
|---|---|---|
| Sensor Fusion | Integration of heterogeneous sensors | Improved situational awareness |
| Machine Learning | Adaptive algorithm training | Enhanced predictive capabilities |
| Regulatory Alignment | Safety and accountability standards | Increased public trust |
| Industry Collaboration | data sharing and standardization | Accelerated innovation cycles |